自从我们宣布VEX人工智能大赛(VAIC)试点以来,已经有很长一段时间了。全球性的疫情让很多团队参加Pilot的能力放缓。VEX利用这段时间加快了我们的硬件和软件开发,为下一个VAIC赛季做准备。本报告旨在向VEX社区通报VAIC的潜力和未来。许多关于VAIC未来的计划和信息从来没有详细公布过,所以我想现在花一分钟时间来做这件事。
我们开发VAIC有几个原因。目的不仅仅是想确保VEX和RECF拥有世界上最好的机器人比赛。我们从有经验的VRC和VEX-U队伍那里听到,他们想要更大的挑战。
VAIC的目标
- 仅自主挑战
- 更多软件工程:对象检测、GPS、通信和战略。
- 更多的机械工程。3D打印、机械加工、新材料和两个机器人。
- 更多电气工程:允许定制电子、电路和传感器。
先说一下背景
VEX内部开发用于比赛的AI已经有一段时间了。在这一过程中,我们意识到,如果没有机器人的位置信息,物体检测的作用是有限的,特别是对于团队编程自适应策略。所以我们扩大了努力,专门为VEX比赛开发了一个室内GPS。我们还意识到,机器人需要协调他们的工作,所以我们还将机器人与机器人之间的通信添加到我们不断增长的开发需求列表中。
在这一过程中,我们意识到,典型的VAIC团队可能没有时间或经验来训练一个物体检测模型。原因之一是它需要几个月的努力。另一个原因是,我们使用了一个由数十万张VEX游戏和目标物体的标记图像组成的自定义数据集,这些图像的位置、方向、光线条件等各不相同。训练模型需要大量的经验与专业工具。然而,VEX有一个明显的优势。我们提前一年就知道游戏的情况。我们可以开发、训练、测试和微调物体检测模型,并在比赛开赛时准备好。这使得各队可以利用这些信息,而不需要每个队年复一年地重复努力。如果各队愿意,他们仍然可以开发自己的物体检测方法。我们有未来的计划,使这项任务更容易。
VEX GPS相机传感器
VAIC Pilot实现的GPS使用了单独的Flir摄像头和Nvidia Nano上的处理,通过USB发送到V5大脑。这种方法不允许轻松集成到VEXos和VEXcode中。我们计划用新的硬件和软件来纠正这个问题。
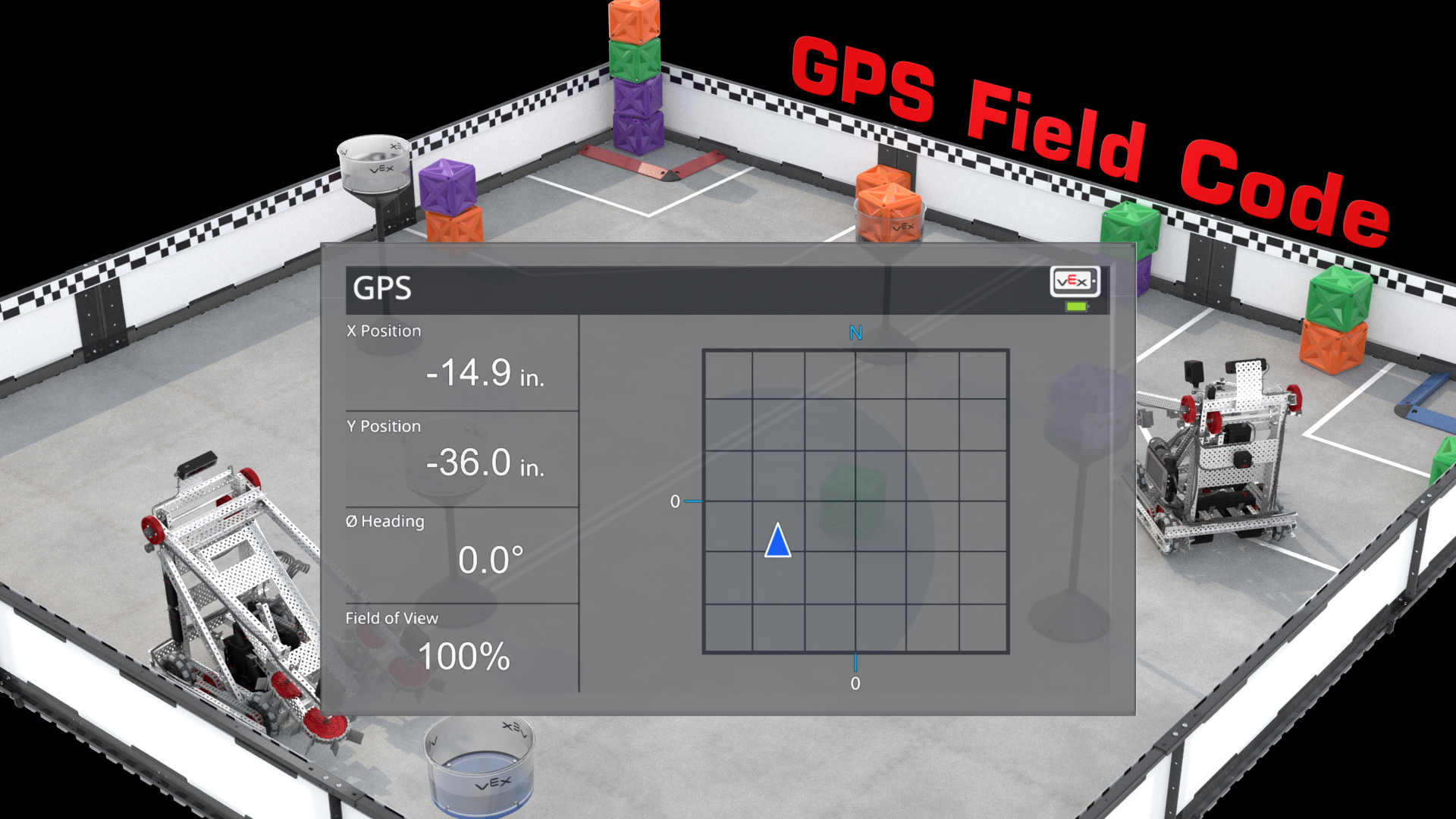
VEX正在建立一个GPS相机传感器,它可以捕捉VEX GPS现场代码图像并计算位置。该传感器使用单色相机来提高低光性能,并使用全局快门来消除图像的振动。内部处理器可实时完成所有的位置计算。这款传感器有一个V5智能端口,可以将这些数据直接传递给V5大脑和VEXos,使得数据使用起来非常方便。
与最初发布的Nvidia Nano相比,GPS软件也有了很大的改进。第一个GPS软件的改进是,现在在观看杂乱无章、碎片化的场景时,只有零星的现场代码可见,它可以找到自己的位置。因为这项改进有助于相机使用覆盖更大角度跨度的代码,结果是更好的三角测量和定位精度。额外的软件改进使获得光学位置定位所需的时间加快到40毫秒。软件的第二项改进是由GPS相机传感器内部的6轴陀螺仪和加速计芯片实现的。卡尔曼滤波器将陀螺仪和加速度计数据与光学位置位置结合起来,以便每5毫秒得出一次位置估计。这种位置估计允许传感器继续估计位置,即使GPS相机传感器的现场代码视图被完全阻挡。
该传感器预计将于2021年5月上市。该传感器套件将配备一个新的12英尺长的GPS现场代码条,更加坚固,更容易安装。
VEX AI立体摄像机传感器
VAIC Pilot实现的AI物体检测使用了英特尔立体深度摄像头,并在Nvidia Nano上进行处理。使用Nano的缺点是它的PCB裸露在外,需要一个外壳,冷却所需的风扇,以及需要V5 3线口的电源。此外,nano只能通过USB与V5大脑进行通信,这使得软件比必要的复杂。我们计划通过新的硬件和软件来纠正这些问题。
VEX正在打造一款独立的AI立体摄像头传感器,将两个摄像头和更强大的AI图像处理集成到一个设备中。这个传感器有一个V5智能端口,可以将这些数据直接传递给V5大脑和VEXos,使数据易于使用。这款传感器还拥有两个USB主机/设备端口,并内置5.8GHz WiFi。
AI相机传感器的软件正在进行重大改进。我们在2021年比赛中的目标将是提高低光和远距离的物体检测能力。除了物体检测的改进外,还将使用Kahlman滤波器来减少物体检测中的闪烁。我们将实现对物体检测问题的支持。如果一个团队在检测物体时遇到困难,他们可以向我们发送他们的环境图像,以及他们的机器人看到的东西,我们可以创建额外的数据并推送更新。获得这些反馈将帮助我们解决所有的环境场景。
机器人检测目前还没有内置到VEX AI网络中,因为我们缺乏足够的VAIC机器人及其设计数据。这主要是由于加工规则造成的。为了缓解需要知道四个机器人的位置的问题,我们将实现机器人的无线定位。VEXos将广播GPS位置并接收所有其他机器人的位置。一旦参赛队开始使用新系统,我们将评估其实用性。
这个传感器预计将在2021年第三季度末推出。
知识库中的文档
当新的系统可用时,我们将有更多的文档来让团队快速启动和运行。主题如下。
- 入门
- VEX场和游戏对象坐标系
- VEXcode示例代码(C++和Python)
- 软件API列表和说明
- 使用对象检测数据
- 开车到一个位置
- 将机械手移动到对象上
- 机器人之间的通信
最后的想法
VEX和RECF为VAIC投入了大量的心血和精力。我们将继续发展这个项目,使其成为世界上最好的机器人比赛。我们希望不久后能与大家见面。谢谢大家。请注意安全。
来自VEX联合创始人Bob Mimlitch