Wiki
VEX-IQ 底盘动力总成的选择
如何选择 VEX-IQ 底盘动力总成
动力传动系统允许机器人通过使用车轮,油箱踏板或其他方法移动。动力传动系统有时被称为动力基础。在设计机器人时,确定要使用哪种动力传动系统是首要考虑因素之一。 VEX IQ Clawbot传动系统非常适合入门,但是其他传动系统设计可以使机器人具有更多功能,例如除了向前和向后旋转之外,还可以侧向移动。这种运动称为全向运动。动力传动系统也可能需要越过障碍物行驶。通过选择适合其游戏策略的动力传动系统,旨在玩游戏的机器人可以获得竞争优势。
为竞赛机器人选择动力传动系统时应考虑的一些事项
- 在运动场上是否有需要越过或爬上的障碍物?坦克胎面或更大直径的车轮可以帮助克服障碍。
- 全向传动系统有多大的优势?
- 动力传动系统是要推动多个/沉重的游戏,还是需要快速?可以通过改变传动比和/或改变车轮直径来调节由传动系统产生的最大速度或扭矩。
- 机器人设计能够达到多高和多远?伸出和/或伸出的机器人受益于更大的传动系统占地面积和较低的重心。小直径的轮子可以帮助两者。
- 除传动系统以外的功能还需要多少个电动机?一些游戏规则限制了机器人上的电动机数量。
这些注意事项是为教室游戏机器人或VEX IQ Challenge机器人选择动力传动系统时应使用的分析示例。
下面来看看几种常见的底盘动力结构
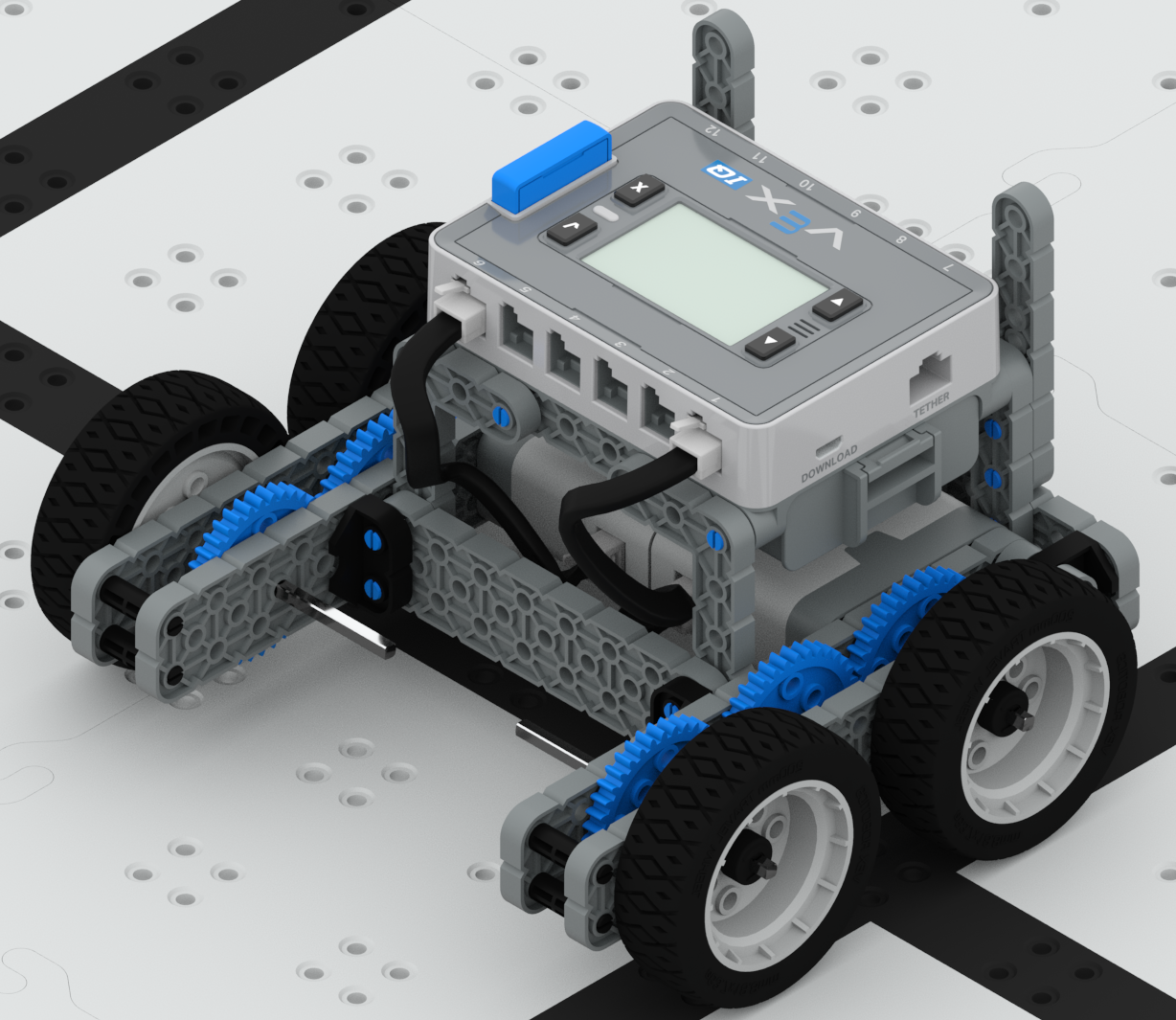
1、标准驱动(Stand Drive)
标准传动系统也被称为滑移转向传动系统,是最常见的传动系统类型之一。标准传动系统可以由两个电动机提供动力,这些电动机可以用于直接为驱动轮提供动力,也可以是齿轮箱的一部分,齿轮箱可以具有多个驱动轮。动力传动系统也可以被设计为具有多个电动机和多个车轮。这些变化有时称为四轮驱动,六轮驱动等。该传动系统可以使用多种VEX塑料轮。但是,它缺乏全方位的能力。
2、H型底盘(H Drive)
H传动使用三个或五个电机,四个电机200mm的行进全向轮和第五个200mm的行进全向轮组垂直于传动系统的其他车轮之间。车轮的布置使该传动系统是全向的。机器人试图将第五个中心轮滑过时,它可能会卡在障碍物上。

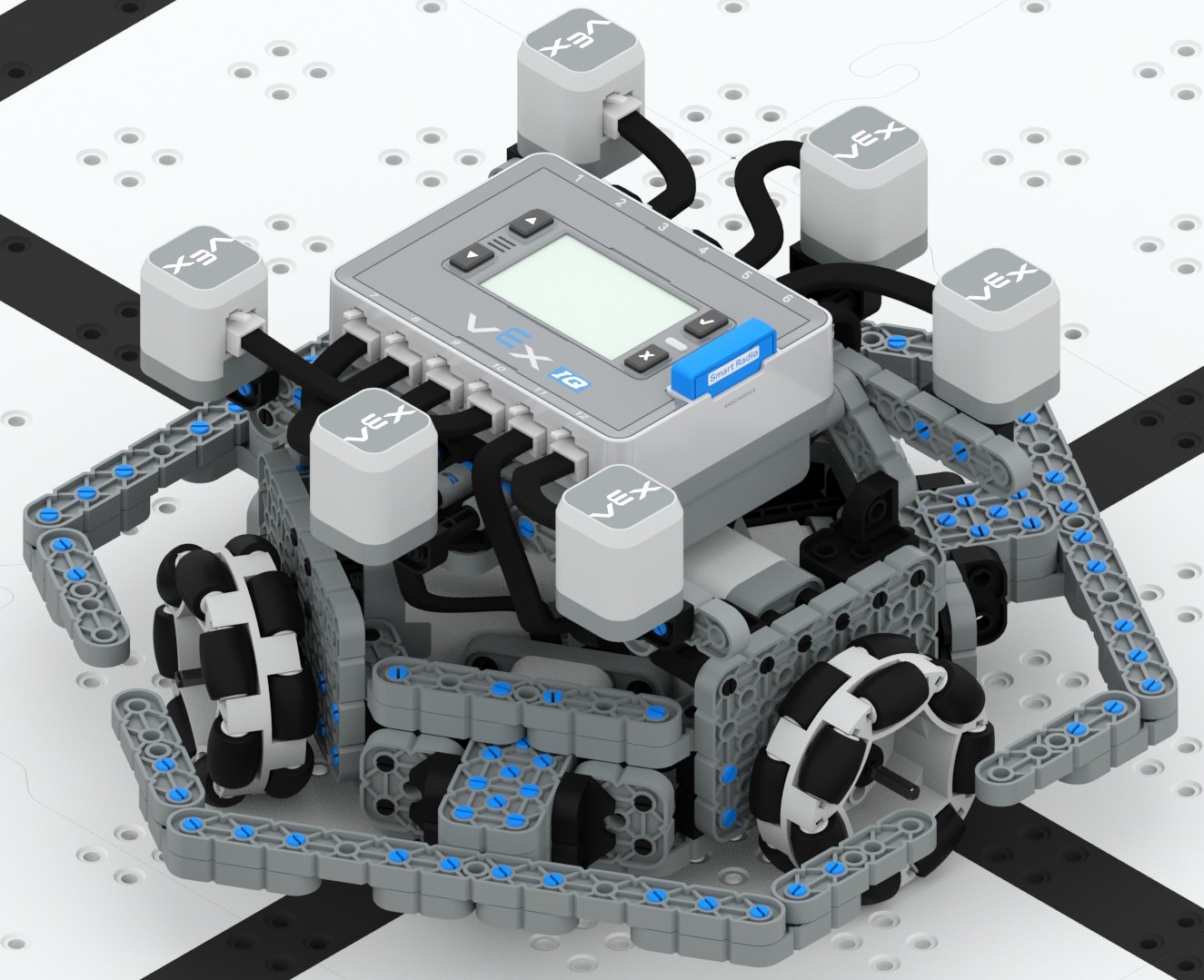
3、全向地盘( Holonomic)
完整的动力传动系统是全向的。该设计可以与三个200mm行走全向轮和三个智能马达或四个200mm全方位向轮和四个智能马达组装在一起。
三个全向车轮和三个驱动马达版本装配在一起,车轮彼此之间的位置设置为120 o。Kiwi驱动器构建说明中包含此类驱动器。
可以通过在每个角上倾斜车轮(有时称为X驱动器)或将驱动轮放在驱动器基座两侧的中央来组装四个全向轮和四个电机版本。
这些完整的传动系统比标准传动系统需要更复杂的编程代码。3轮传动系统不如4轮传动系统稳定。

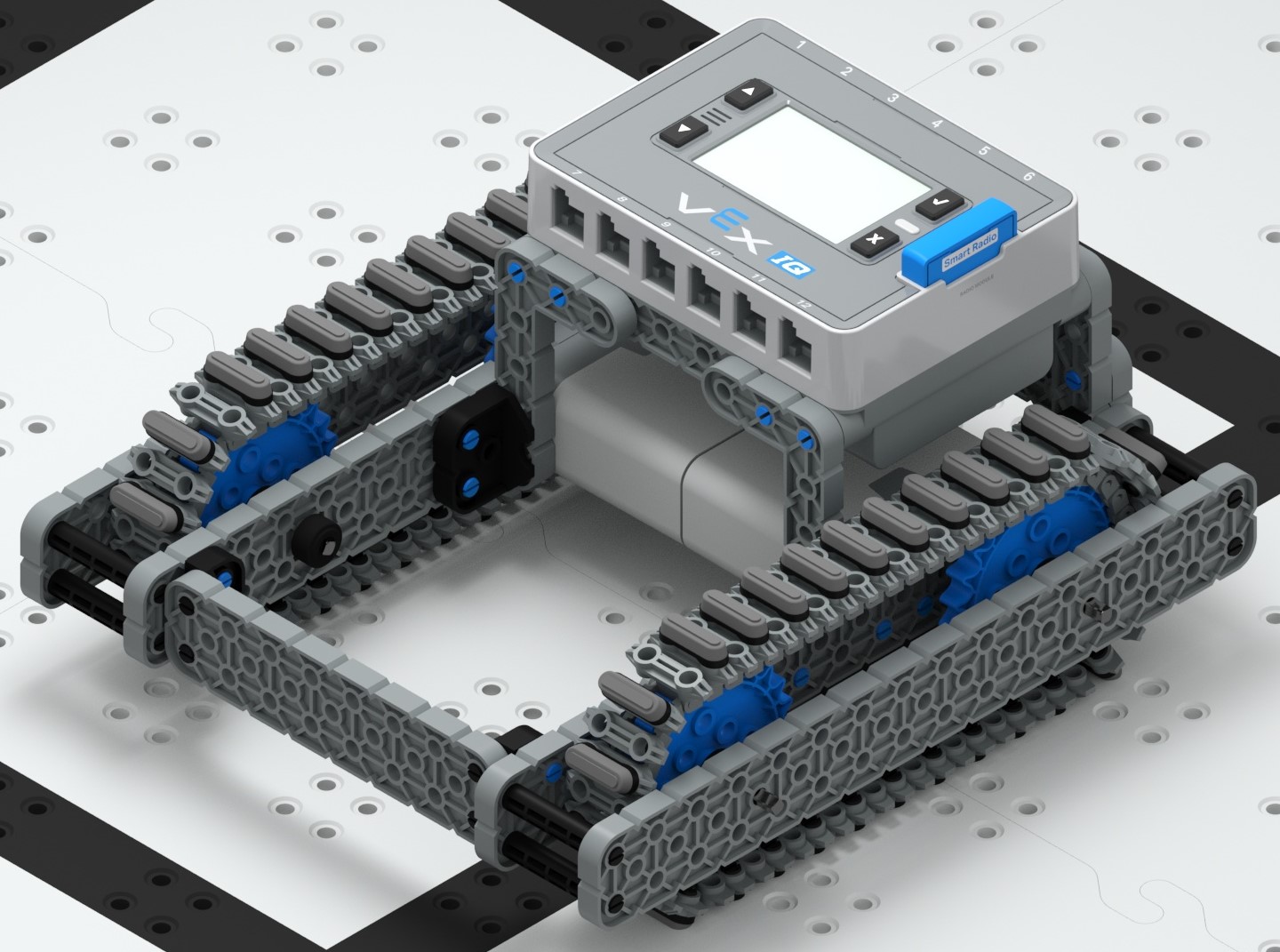
4、履带驱动(Track Drive)
履带驱动器是标准动力传动系统的另一种变体,它使用油箱胎面代替车轮。Tank Tread包含在Competition Add-On套件中,并随Tank Tread和Intake套件一起提供。履带驱动器可以轻松越过障碍物。但是,磁道驱动器缺乏全向能力。可以将油箱踩踏和进气套件的牵引力链接添加到油箱胎面,以增加动力传动系统的牵引力。油箱踏板由VEX塑料链轮驱动。
以上几种底盘驱动总成的比较
| Stand Drive | H Drive | Holonomic | Track Drive | |
|---|---|---|---|---|
| 最少电机数 | 2 | 3 | 3 | 2 |
| 轮子 | Omni或者履带 | 通用 | Omni | 履带 |
| 全向控制 | 否 | 是 | 是 | 否 |
| 编程要求 | 基础 | 中等 | 高级 | 基础 |
| 障碍通过性 | 好 | 差 | 一般 | 非常好 |